UC San Diego — Fall Quarter 2025 (September – December)
This project explored autonomous lap driving on the DonkeyCar platform across four configurations — starting in simulation and progressing to a physical RC car with multiple sensing modalities. Each variant tested a different approach to perception and control: behaviour cloning from human demonstrations, GPS-based waypoint following, and computer vision lane tracking.
Human expert demonstrations were collected by driving manually around a simulated track, recording image frames alongside steering angle and throttle at each timestep. A TensorFlow Lite model was trained via behaviour cloning / imitation learning on this data and tasked with completing 3 autonomous laps. The model was evaluated both locally and on a remote server, with the remote session streamed live on Twitch.
Local autonomous laps
Remote laps streamed on Twitch
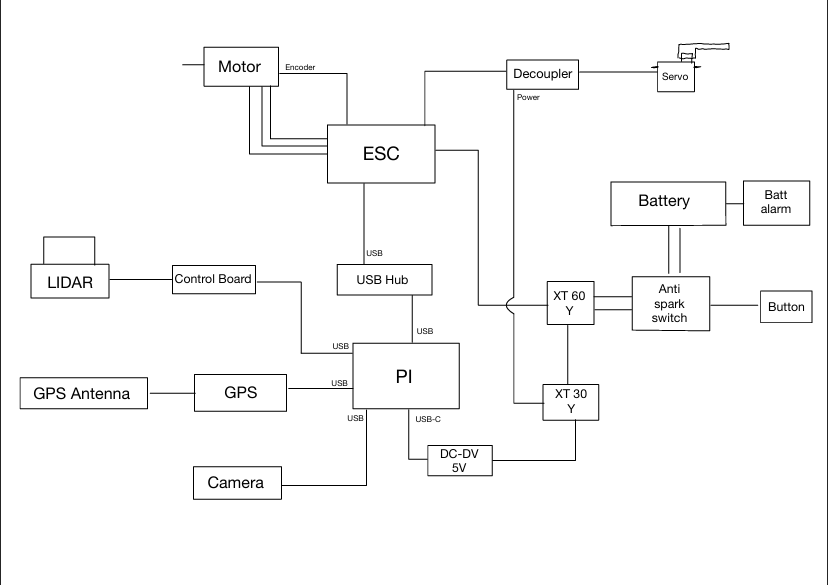
The physical DonkeyCar was built on a standard RC chassis with the following hardware stack:
Fully assembled DonkeyCar driven via RC remote on the outdoor track.
The same behaviour cloning approach from the simulation was applied to the physical car using the OAK-D Lite camera on an outdoor track. Human demonstrations were collected on the physical platform and used to train a TensorFlow Lite model for 3 autonomous laps.
Using the PointOneNav GNSS module, the car navigated a figure-8 lap route on the UCSD Snake Path autonomously via GPS waypoint following with tuned PID values. The track below shows the figure-8 lap path overlaid on the course.

Yellow strips were placed along an outdoor path as lane markers. A ROS2 computer vision module running inside a Docker container (djnighti/ucsd_robocar) on the Raspberry Pi processed OAK-D Lite frames through a tuned color filter to detect the strips. PID values were tuned to complete 3 autonomous laps using the detected lane center as the control signal.