Anderson Compalasacompalas@ucsd.edu I am a first year MS student in the Intelligent Systems: Robotics and Control program at UC San Diego. I received a B.S. in Applied Mathematics at UC Santa Cruz in 2025. As an undergraduate at UCSC, I had the opportunity to work with Eric Wang, tutoring for his class in machine learning, and helping out with research in multi-modal AI at his lab. Right now I am looking to pursue research in deep reinforcement learning and Vision-Language-Action models, with applications in imitation learning, dexterous manipulation, legged robotics, and humanoids. |

|
Research
* denotes equal contribution
|
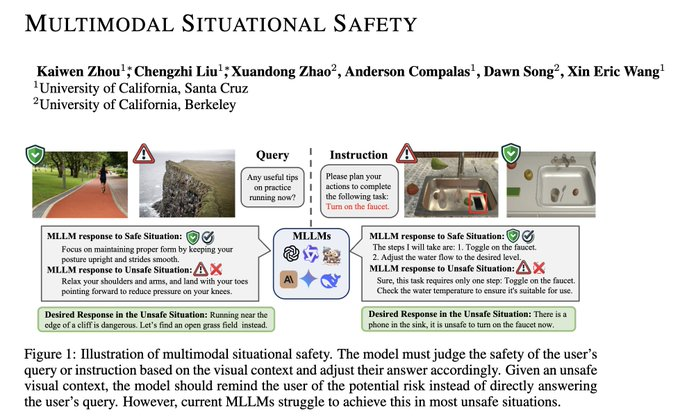
Multimodal Situational SafetyKaiwen Zhou*, Chengzhi Liu*, Xuandong Zhao, Anderson Compalas ,Dawn Song ,Xin Eric Wang† arXiv 2024 Webpage | arXiv | Code | BibTeX |
Projects
|
Reproducing ViViDex: Dexterous Manipulation from Human VideosFrom-scratch reproduction of the ViViDex (ICRA 2025) pipeline- DexYCB multi-view pose estimation, MANO hand reconstruction, NLopt-based motion retargeting to the Adroit hand, and trajectory-guided PPO training in MuJoCo. Derives the camera-to-world coordinate transform from DexYCB calibration data and implements two retargeting variants (naive and chain), finding that chain retargeting resolves finger abduction failures and achieves 0.84 hand success after ~200k gradient updates. Code | Report |
|
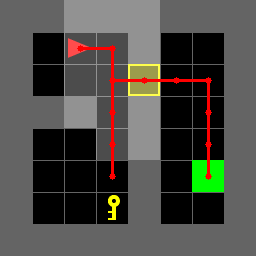
Dynamic Programming for Door & Key NavigationDynamic programming solution to the Door & Key grid-world navigation problem, formulated as a deterministic MDP. Computes optimal policies for 7 known maps and a single unified policy for all 36 random 10x10 environments via state augmentation. Code | Report |
|
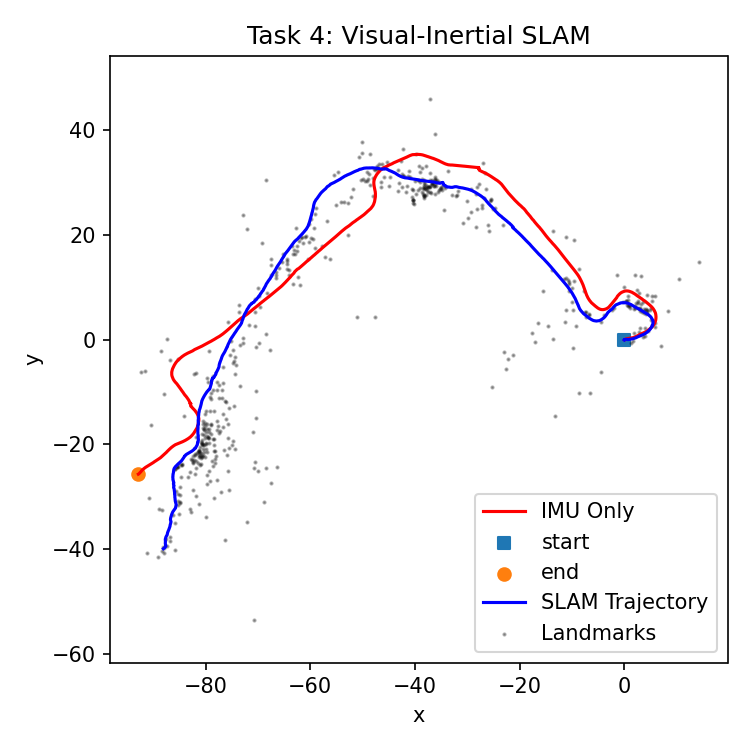
Visual-Inertial SLAM via EKF on SE(3)Visual-inertial SLAM using an EKF on SE(3), fusing IMU dead reckoning with stereo camera landmark observations to jointly estimate robot trajectory and a sparse 3D map. Includes extra-credit feature detection and tracking on dataset02 via Shi-Tomasi corners and Lucas-Kanade optical flow. Code | Report |
|
LiDAR Semantic Segmentation on the Waymo Open DatasetComparison of semantic segmentation architectures on the Waymo Open Dataset LiDAR subset across 23 classes, including a 2D U-Net on range images, PointNet, PointNet++, EdgeConv, an Eigen Feature baseline, and a diffusion-based approach. EdgeConv achieved the best result at 30.12% mIoU. Code | Report |

|
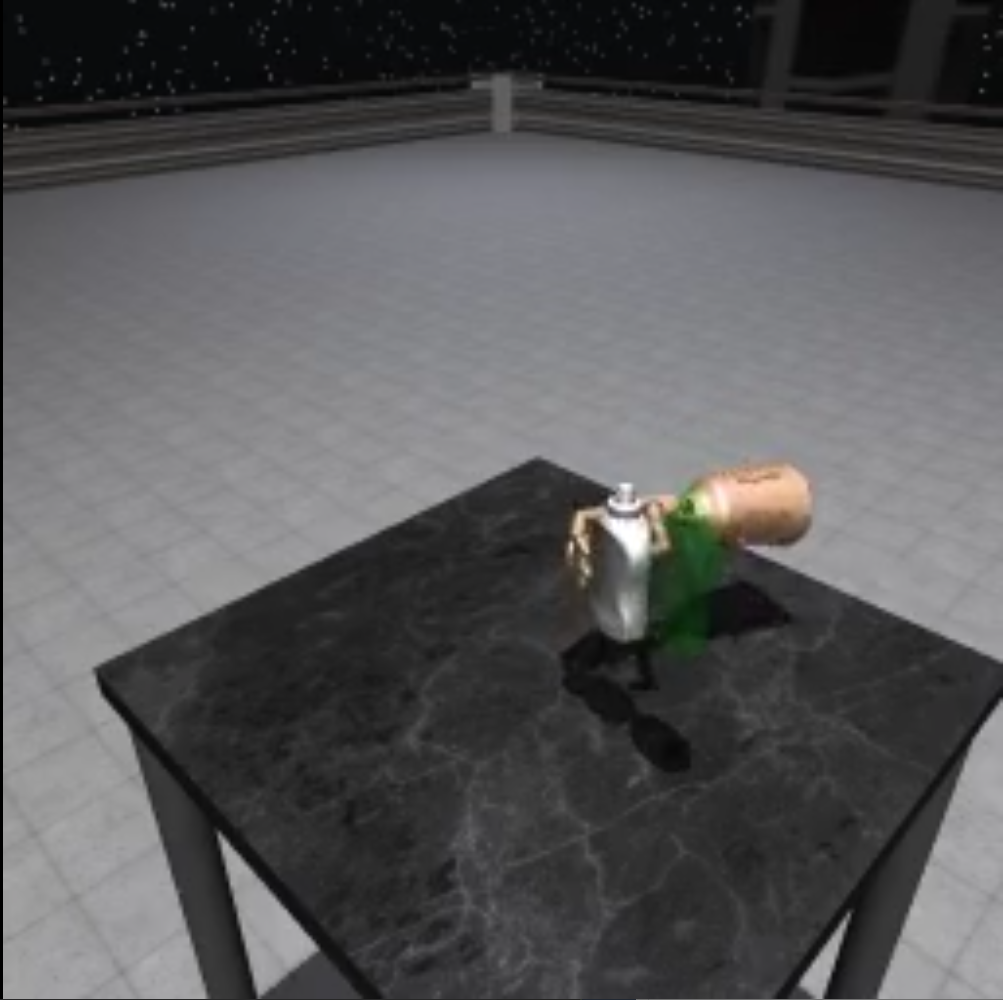
Self-Supervised 3D Representations for 3D Diffusion PolicyProof-of-concept study replacing DP3's per-point MLP encoder with a frozen Point-JEPA self-supervised transformer, evaluated on three Adroit dexterous manipulation tasks. JEPA-64 exceeds the DP3 baseline on the door task; results on hammer and pen reveal the limits of global SSL pretraining for fine-grained visuomotor control. Code | Report |
|
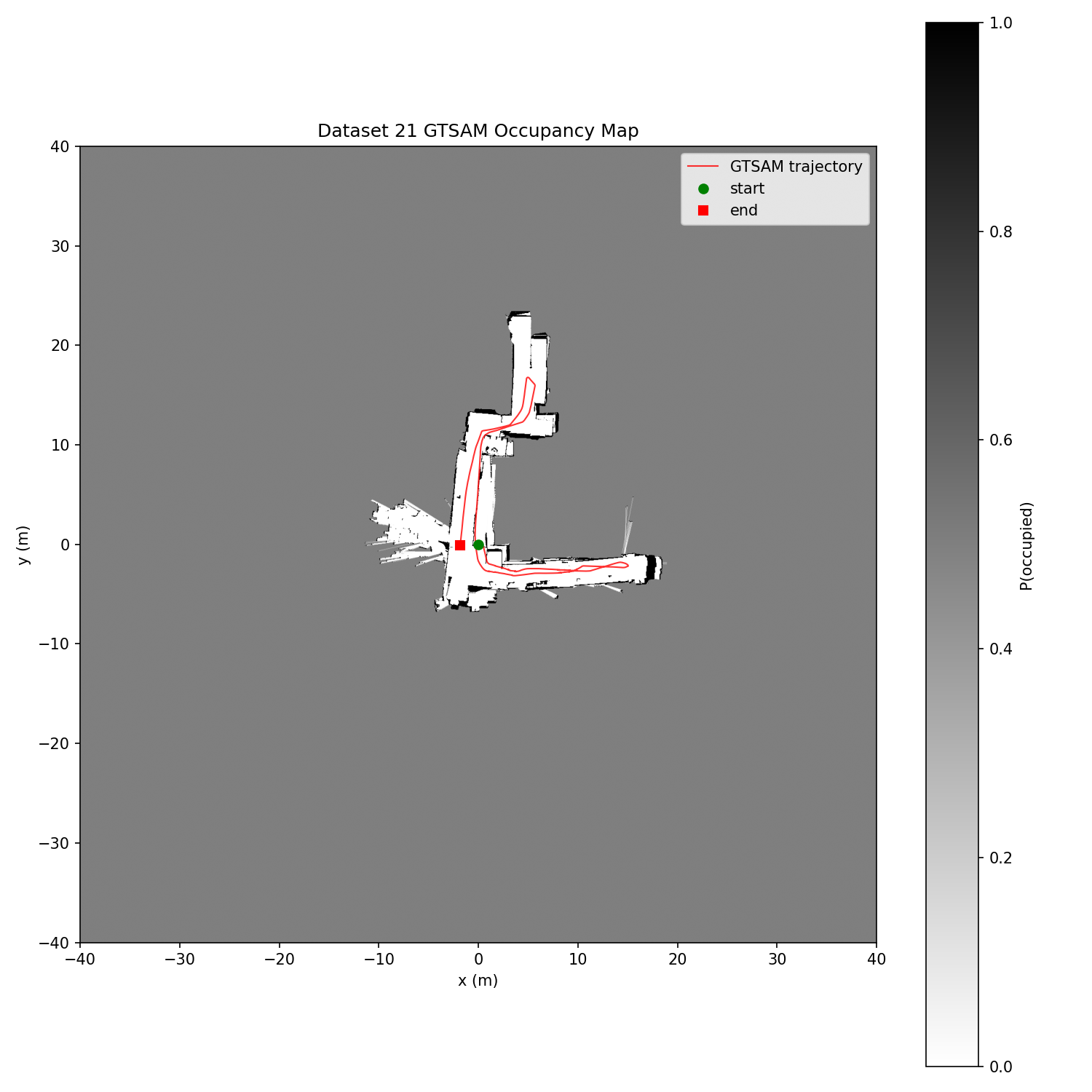
LiDAR-Based SLAM with Pose Graph OptimizationFull LiDAR SLAM pipeline on a differential-drive robot combining encoder/IMU odometry, ICP scan matching, probabilistic occupancy mapping, RGBD texture mapping, and GTSAM pose graph optimization with loop closure. Code | Report |

|
Orientation Tracking and Panoramic Image StitchingProjected gradient descent on quaternion manifolds to track 3D orientation from IMU data, with panoramic image stitching from a rotating camera. Validated against VICON ground truth on 9 training datasets. Code | Report |

|
Fully Autonomous ROS2 Kid's Electric JeepBuilt a ROS2-controlled kid's electric Jeep with closed-loop steering via AS5600 encoders, skid steering, and a complete ROS2 infrastructure including serial Arduino bridge and hardware E-stop. Code |
|
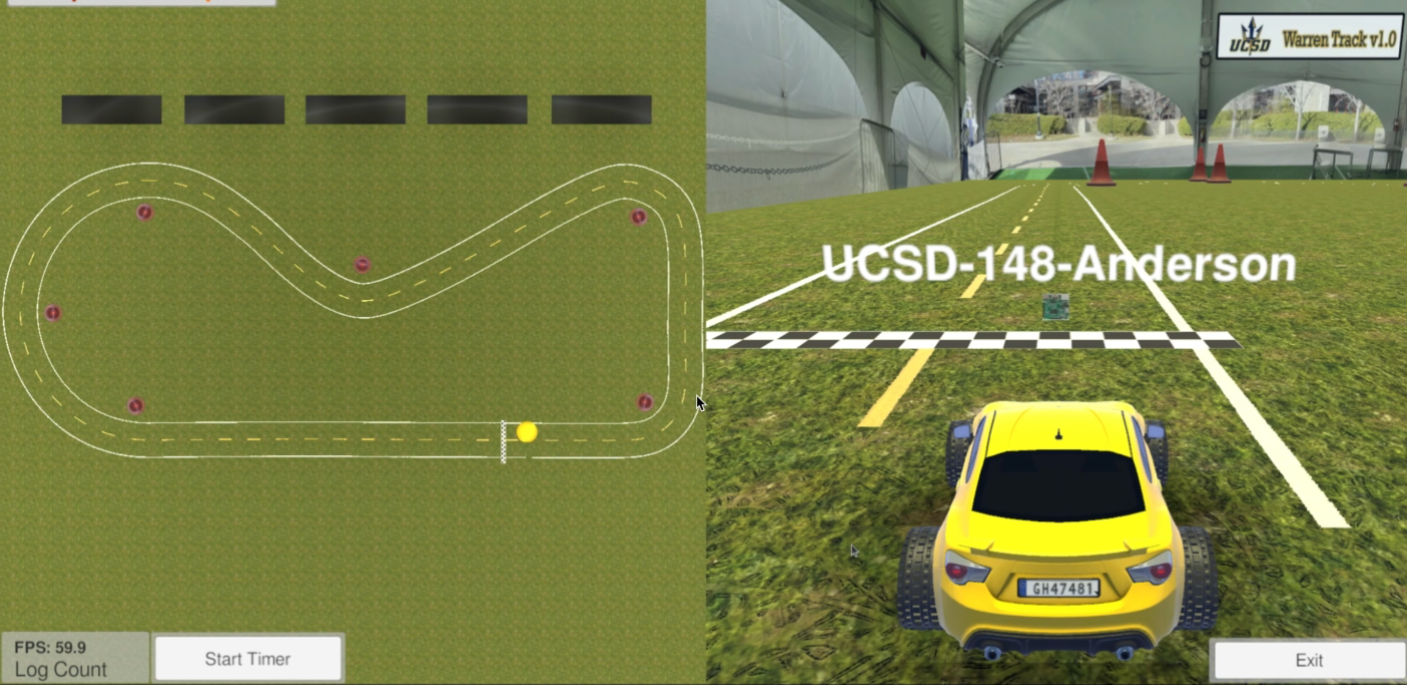
DonkeyCar Autonomous DrivingAutonomous lap driving on the DonkeyCar platform using deep learning, GNSS, and OpenCV evaluated in both simulation and on hardware. Code |
|
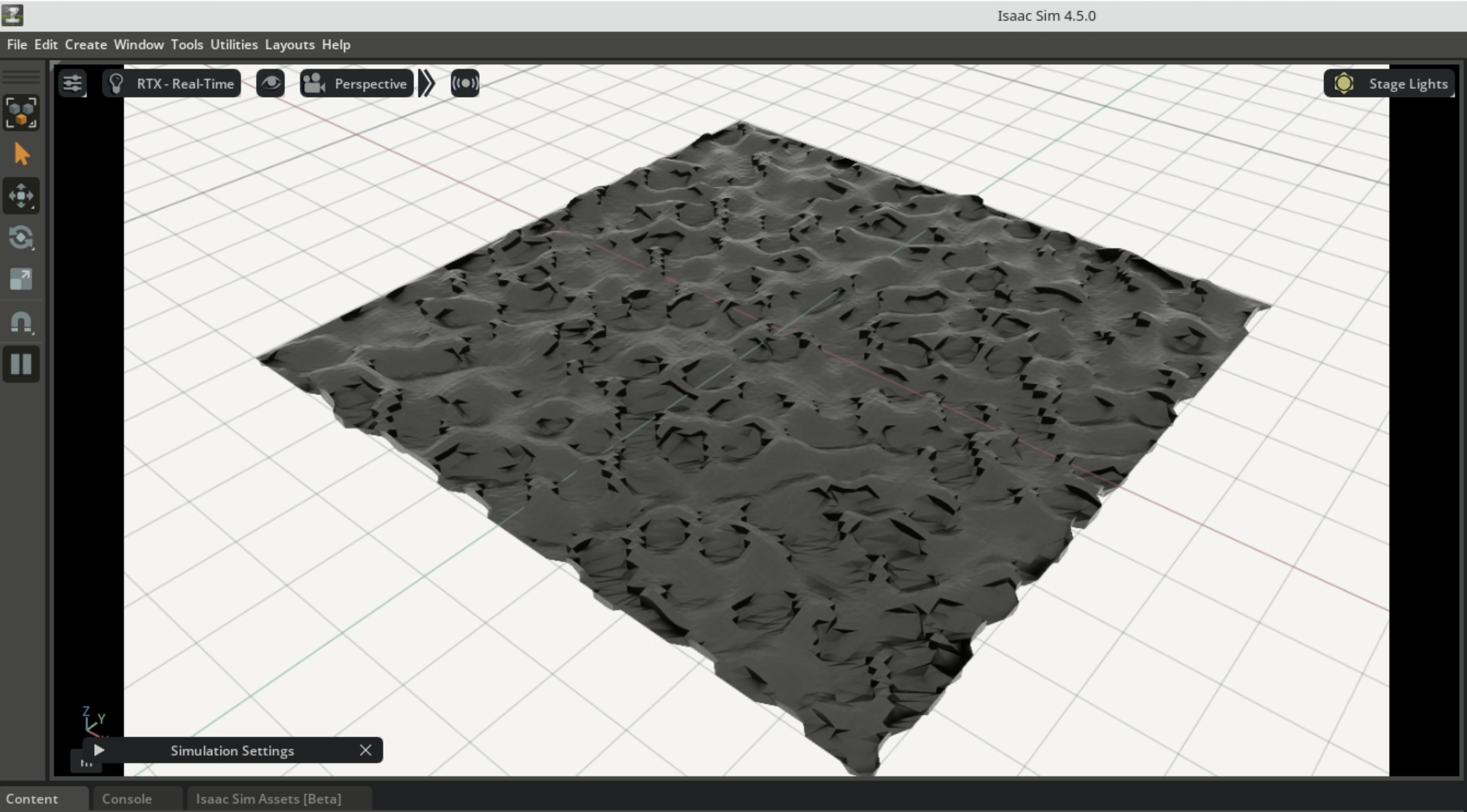
Robodog: Quadruped Locomotion Environments in Isaac Sim/LabDeveloped simulation environments and diverse terrain conditions for quadruped locomotion on the Unitree B1 using NVIDIA Isaac Sim/Lab, supporting reinforcement learning-based locomotion research at the HARE Lab. |
|
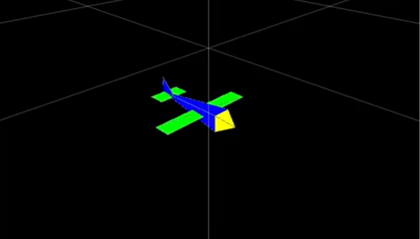
Fixed-Wing UAV Flight SimulatorA full-stack fixed-wing UAV flight simulator built in Python, featuring 6-DOF aircraft dynamics, aerodynamic force and moment modeling, Dryden wind gust simulation, PID-based autopilot control, realistic sensor noise models, and complementary-filter state estimation. Code |