The goal of this project was to transform a full-size kid's electric Jeep into a ROS2-controlled autonomous robot platform, providing a larger robot car base for future MAE 148 final projects. All stock electronics besides the drive motors and batteries were replaced with custom robotics components. The result is a vehicle that is fully controllable via ROS2, with closed-loop steering, skid steering, forward/reverse drive, and a hardware emergency stop.
The completed RoboJeep platform.
Team
Anderson Compalas — ECE
Jobanpreet Mutti — MAE
Saul Armenta — ECE
Bastian Müllner — visiting student from TUM (UPS)
Accomplishments
Full ROS2 control stack — steering angle (closed-loop), skid steering, and throttle
Closed-loop steering with AS5600 absolute encoder and P-controller
Encoder hardware installed on all four wheel motors (AS5600 Hall-effect sensors)
Hardware E-stop relay wired directly to the RC remote, bypassing the Jetson Nano — safe operation at all times
Complete serial bridge between Jetson Nano and dual Arduino Mega 2560s
Hardware
⚠ Warning: Charge the battery regularly — there is no undervoltage protection. It should always stay above 22.5 V. Pull out a power cable at the 24 V splitter and use a multimeter to check.
ℹ E-Stop: The emergency stop is the top-right button on the remote; the green light indicates it is triggered. All H-Bridges require a 5 V enable signal to move. If nothing moves, check that the E-stop is not triggered (red LED on relay board = triggered). All enable wires are yellow.
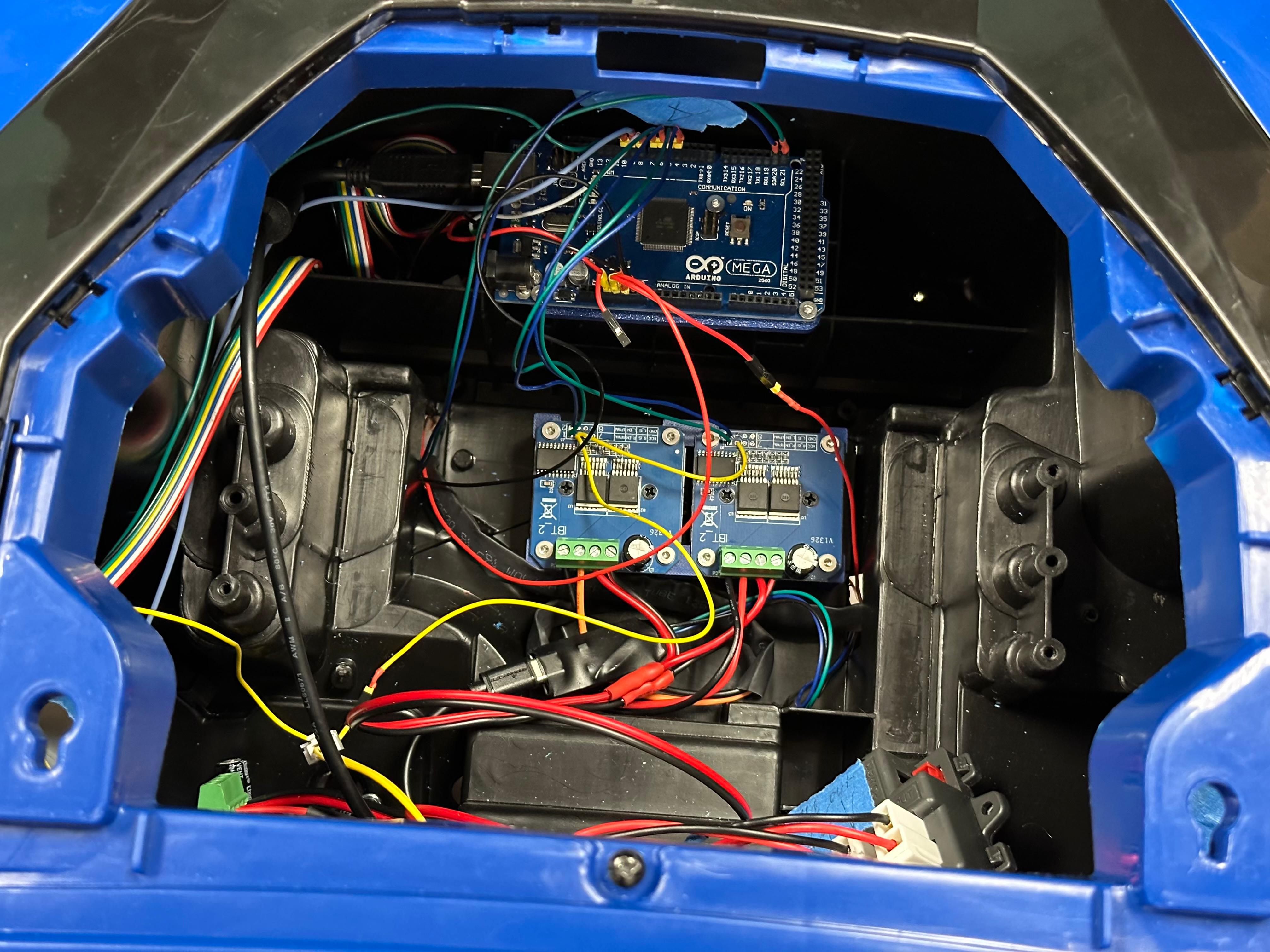
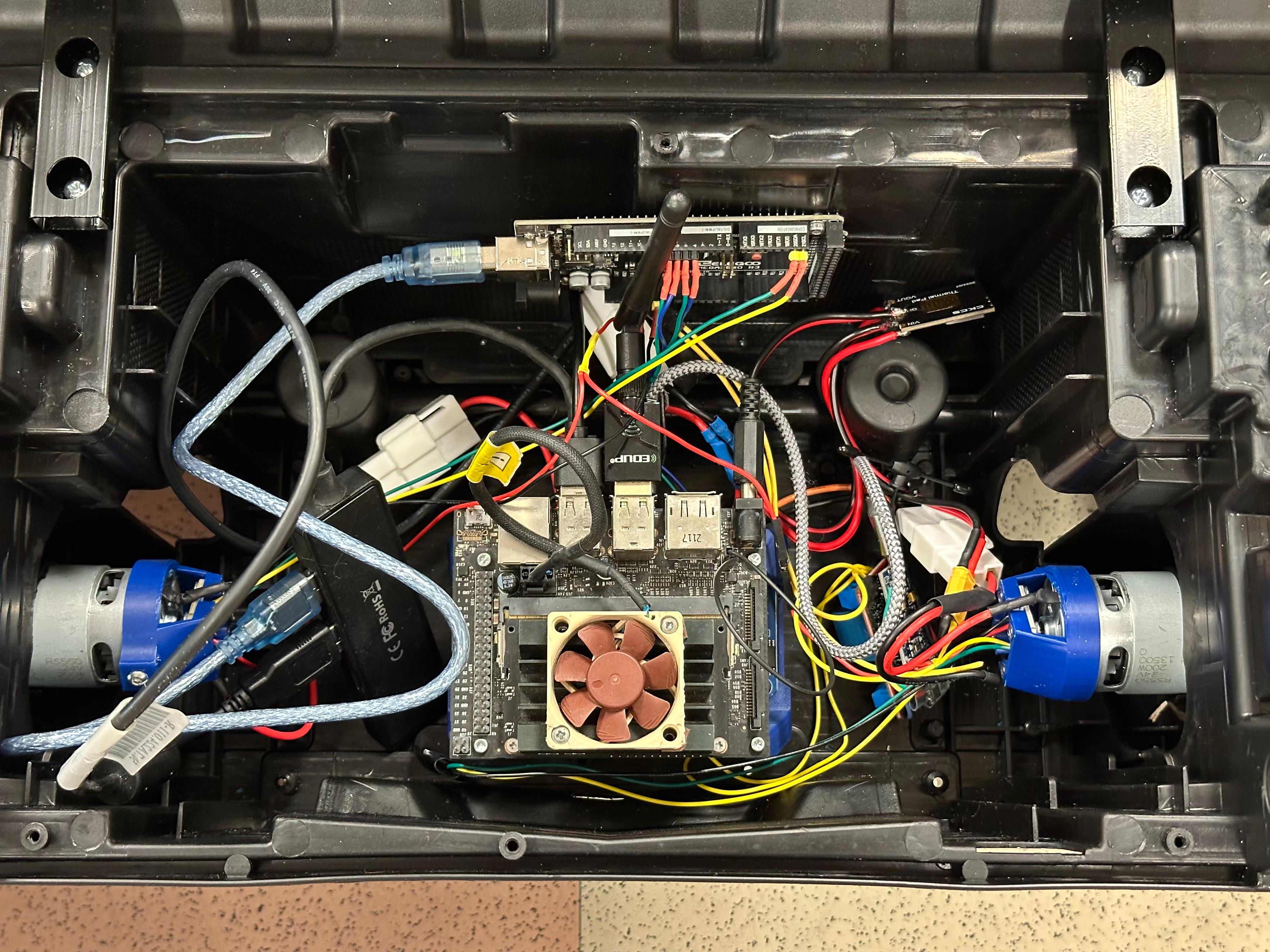
Electronics
Compute: Nvidia Jetson Nano
Motor control: 2× Arduino Mega 2560 — drive H-bridges, read two wheel encoders each, read steering encoder
Encoder reading: 2× Arduino Micro Pro — one per remaining wheel encoder (AS5600 I²C address conflict workaround)
Motor drivers: 5× H-Bridge (MTDELE)
Wheel feedback: 4× AS5600 Hall-effect encoders
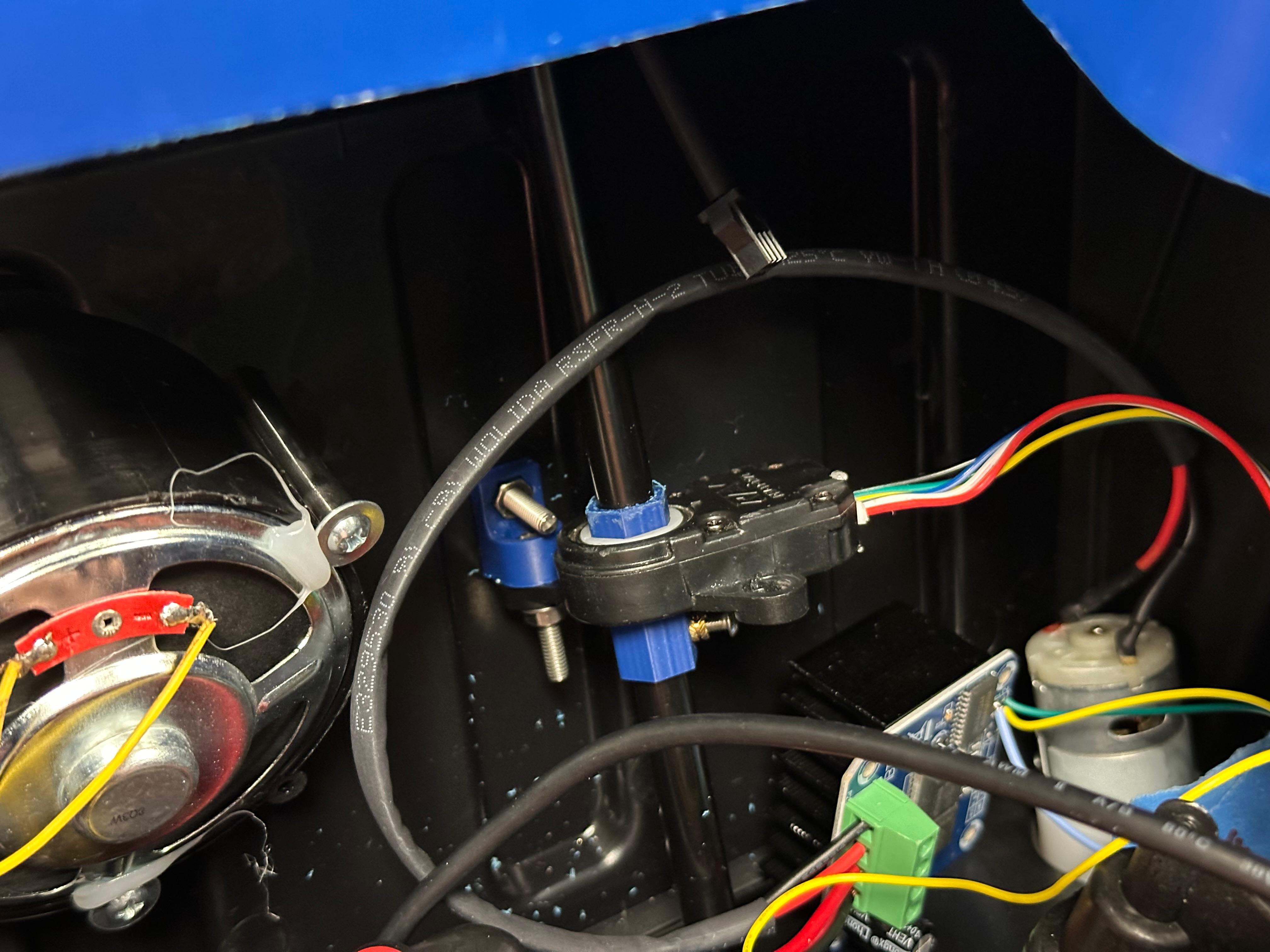
Steering feedback: REV-11-1271 absolute encoder
RC receiver: Radiomaster receiver → Arduino Micro Pro (USB joystick via ELRS Controller) → Jetson Nano
Safety: Relay board cuts 5 V enable to all H-bridges when E-stop is triggered
Wiring
Full wiring diagram for the RoboJeep platform.
Mechanical
Custom 3D-printed brackets were designed to mount all electronics. A printed steering spacer was also added to take up manufacturing tolerances in the steering assembly, significantly improving steering accuracy and repeatability.